Overview
基础概况
相比 MPU6050,BNO055 更适合快速做姿态交互原型,因为它把复杂融合算法放在芯片内部完成。
Engineering
工程要点
工程要点
- 难度
- 进阶
- 数据状态
- 待核实
- 接口
- I2CUART
- 常用主控
- ESP32ArduinoSTM32Raspberry Pi Pico
供电与采购
- 供电
- 3.3V - 5V,按模块而定
- 购买关键词
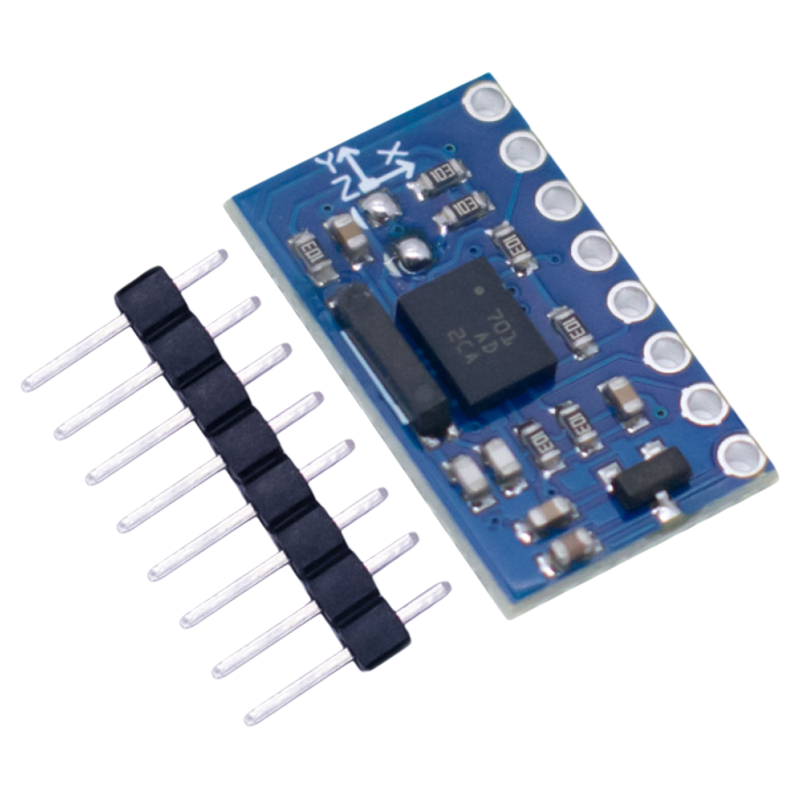
- BNO055 九轴智能姿态传感器模块BNO055 9轴 IMU
典型搭配
运动控制实验
验证执行机构、姿态或运动反馈。
BNO055 九轴智能姿态传感器模块 + ESP32 + 独立电源
Specifications
基础参数
| 参数 | 值 | 分组 | 备注 |
|---|---|---|---|
| 工作电压 | 3.3 - 5 V | 电气参数 | 取决于模块版本 |
| 传感器组合 | 加速度计 + 陀螺仪 + 磁力计 | 检测能力 | - |
| 输出 | 欧拉角 / 四元数 / 校准状态 | 检测能力 | - |
| 常见 I2C 地址 | 0x28 / 0x29 | 接口 | - |
Pinout
引脚与接线
| 引脚 | 说明 | 连接建议 | 注意 |
|---|---|---|---|
| VIN | 电源正极 | 3.3V / 5V | - |
| GND | 地线 | GND | - |
| SCL | I2C 时钟 | ESP32 GPIO 22 | - |
| SDA | I2C 数据 | ESP32 GPIO 21 | - |
| RST | 复位输入 | 可选 GPIO | - |
| INT | 中断输出 | 可选 GPIO | - |
Examples
代码示例
扫描 I2C 地址
python
from machine import I2C, Pin
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=400000)
print("BNO055 I2C devices:", [hex(addr) for addr in i2c.scan()])Applications
应用场景
APP
智能小车与机械结构
BNO055 九轴智能姿态传感器模块 可用于运动控制、姿态检测或执行机构驱动。
BNO055 九轴智能姿态传感器模块ESP32电源模块
Warnings
注意事项
- 磁力计易受电机、磁铁和金属结构干扰,需要校准。
Relations