Overview
基础概况
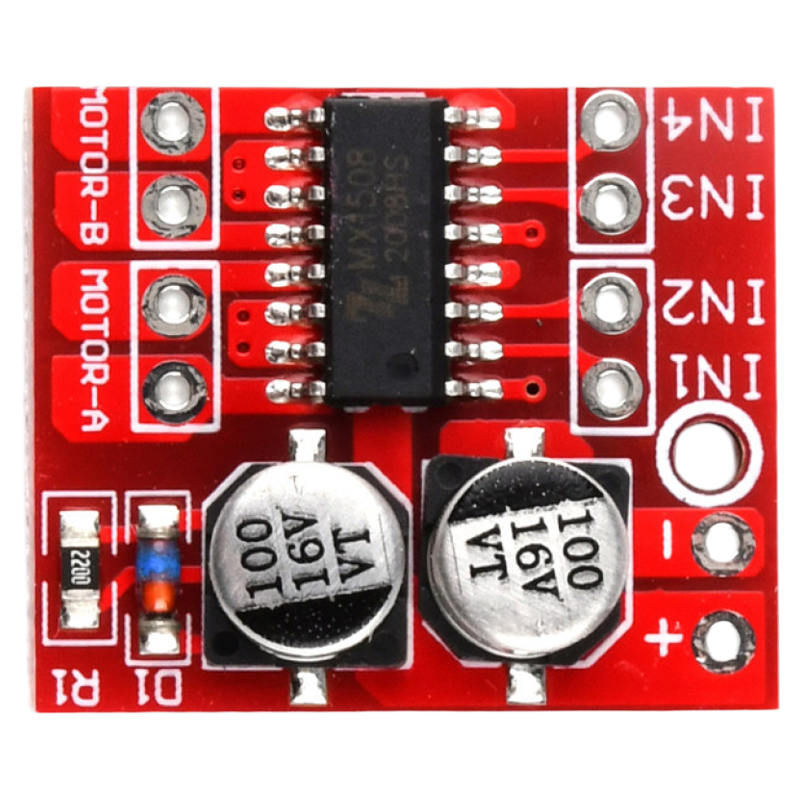
L298N 接线直观,适合教学理解电机正反转和 PWM 调速,但效率不如现代 MOS 驱动芯片。
Engineering
工程要点
工程要点
- 难度
- 中级
- 数据状态
- 待核实
- 接口
- GPIOPWM
- 常用主控
- ESP32ArduinoSTM32Raspberry Pi Pico
供电与采购
- 供电
- 电机电源常见 6V - 12V
- 购买关键词
- L298N H桥电机驱动模块L298N Motor Driver
逻辑电源和电机电源按跳帽配置确认。
典型搭配
运动控制实验
验证执行机构、姿态或运动反馈。
L298N H桥电机驱动模块 + ESP32 + 独立电源
Specifications
基础参数
| 参数 | 值 | 分组 | 备注 |
|---|---|---|---|
| 电机供电 | 常见 6 - 12 V | 电气参数 | - |
| 驱动通道 | 2 路直流电机 | 输出 | - |
| 控制方式 | 方向 GPIO + PWM 调速 | 接口 | - |
Pinout
引脚与接线
| 引脚 | 说明 | 连接建议 | 注意 |
|---|---|---|---|
| +12V | 电机电源正极 | 电池/适配器正极 | - |
| GND | 电源地 | 电池负极与主控 GND | - |
| 5V | 逻辑电源或板载 5V 输出 | 按跳帽配置使用 | - |
| ENA | A 路 PWM 使能 | ESP32 GPIO 25 | - |
| IN1 / IN2 | A 路方向控制 | ESP32 GPIO 26 / 27 | - |
| OUT1 / OUT2 | A 路电机输出 | 直流电机 A | - |
| ENB / IN3 / IN4 | B 路控制 | 另一组 GPIO | - |
Examples
代码示例
单路电机正反转
python
from machine import Pin, PWM
import time
ena = PWM(Pin(25), freq=1000)
in1 = Pin(26, Pin.OUT)
in2 = Pin(27, Pin.OUT)
ena.duty(700)
in1.value(1); in2.value(0)
time.sleep(2)
in1.value(0); in2.value(1)
time.sleep(2)
in1.value(0); in2.value(0)Applications
应用场景
APP
智能小车与机械结构
L298N H桥电机驱动模块 可用于运动控制、姿态检测或执行机构驱动。
L298N H桥电机驱动模块ESP32电源模块
Warnings
注意事项
- L298N 压降较大、发热明显,长时间大电流要加散热并选合适电机。
Relations