Overview
基础概况
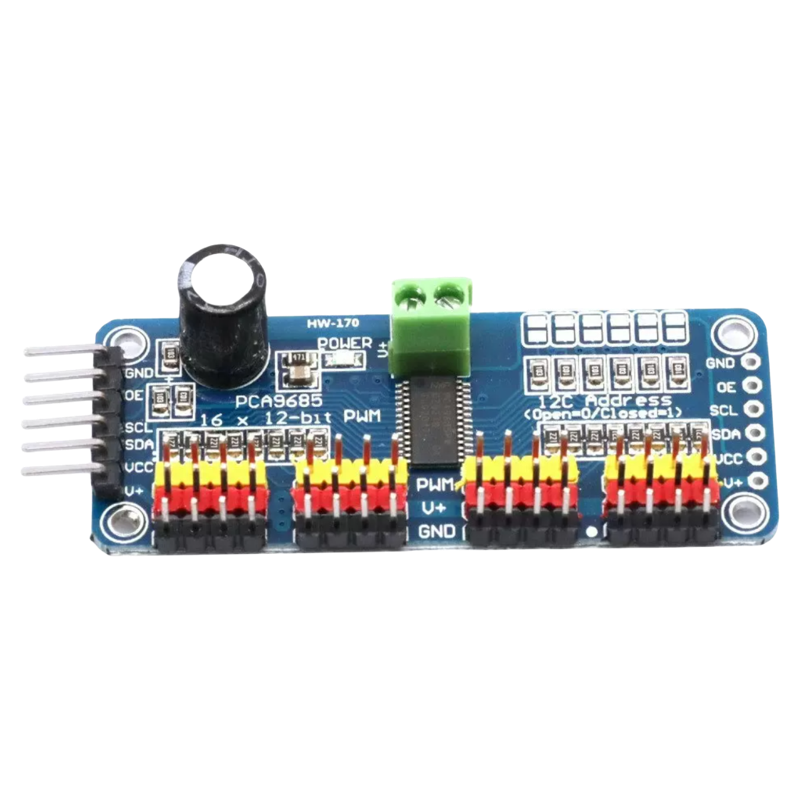
PCA9685 能把舵机 PWM 生成任务从主控中释放出来,多块板还能通过地址级联。青少年项目中常用它做机械臂、四足机器人和表情装置。
Engineering
工程要点
工程要点
- 难度
- 中级
- 数据状态
- 待核实
- 接口
- I2CPWM
- 常用主控
- ESP32ArduinoSTM32Raspberry Pi Pico
供电与采购
- 供电
- 逻辑 3.3V/5V,舵机电源 5V - 6V
- 购买关键词
- PCA9685 16路PWM舵机驱动板16路舵机驱动板PCA9685 Servo Driver
舵机电源必须独立供电,并与主控共地。
典型搭配
运动控制实验
验证执行机构、姿态或运动反馈。
PCA9685 16路PWM舵机驱动板 + ESP32 + 独立电源
Specifications
基础参数
| 参数 | 值 | 分组 | 备注 |
|---|---|---|---|
| 通道数 | 16 | 输出 | - |
| PWM 分辨率 | 12 bit | 输出 | - |
| 默认 I2C 地址 | 0x40 | 接口 | - |
Pinout
引脚与接线
| 引脚 | 说明 | 连接建议 | 注意 |
|---|---|---|---|
| VCC | 逻辑电源 | ESP32 3.3V / Arduino 5V | - |
| GND | 公共地 | GND | - |
| SCL | I2C 时钟 | ESP32 GPIO 22 | - |
| SDA | I2C 数据 | ESP32 GPIO 21 | - |
| V+ | 舵机电源输入 | 5V - 6V 独立电源 | - |
| PWM0-PWM15 | 16 路舵机 PWM 输出 | 舵机信号线 | - |
Examples
代码示例
扫描 I2C 地址
python
from machine import I2C, Pin
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=400000)
print("PCA9685 I2C devices:", [hex(addr) for addr in i2c.scan()])Applications
应用场景
APP
智能小车与机械结构
PCA9685 16路PWM舵机驱动板 可用于运动控制、姿态检测或执行机构驱动。
PCA9685 16路PWM舵机驱动板ESP32电源模块
Warnings
注意事项
- 不要用开发板 5V 引脚直接带多个舵机,启动电流会导致复位或烧毁。
Relations